1
・0 pv・4 min read
Raspberry Pi Picoで加速度センサ(MMA8452Q)を動かしてみた

はじめに
前の投稿でraspberry pi pico(以下、pico)を動かしてみた。
今回は、加速度センサーを動かしてセンサーの値を取得してみる。
環境
- PC
- windows 10
- pico
- USBケーブル
- 家に転がってたものを
- 加速度センサー(MMA8452Q)
- https://www.switch-science.com/catalog/1927/
- ピンヘッダはあまりものを使ってはんだ付けした
- 330Ωの抵抗 x 2
- 動作確認では手元になかったので使ってないが、ドキュメントを見た感じ合った方がよさそう。
- ブレッドボードやジャンパー
- VDD/GND用 2 or 4本
- SCL/SDA用 2本
- 開発環境
- Visual Studio Code
- 動作確認環境
- TeraTerm
作業方針
- プログラムはpico-exampleにあるmma8451_i2cを使う
- MMA8452Qのチュートリアルでは、SCL/SDAに抵抗を入れているが手元になかったので直結
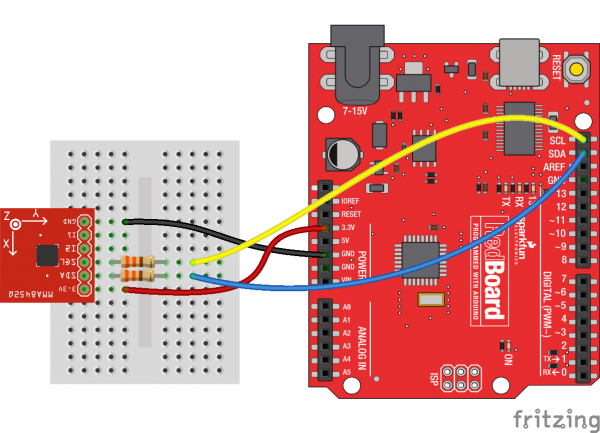
ブレッドボード配置&配線
MMA8452Qのチュートリアルやpico-exampleにあるmma8451_i2cにある配線図とpicoのピン配置図を参考に、3V3, GND, SCL, SDAをそれぞれつなぐだけ。
ピン配置上、SCL/SDAのピンは複数あるが、サンプルではsdkで定義されているデフォルトのピン(GP4, GP5)を使っている。
また、pico-exampleでは電源を3V3ではなくVSYSを使っているが、VSYSは「ボードからPicoのVSYS端子へ3.5~5.5Vを給電」するパターンに使うが、今回はUSBから給電するので3V3を使った。
ピン配置上、SCL/SDAのピンは複数あるが、サンプルではsdkで定義されているデフォルトのピン(GP4, GP5)を使っている。
また、pico-exampleでは電源を3V3ではなくVSYSを使っているが、VSYSは「ボードからPicoのVSYS端子へ3.5~5.5Vを給電」するパターンに使うが、今回はUSBから給電するので3V3を使った。
・ボードからPicoのVSYS端子へ3.5~5.5Vを給電 PicoのマイクロUSBを使用しない場合はこの方法が使えます。供給する電圧は自由度があります。Picoに供給できる電圧は下限1.8Vですが、このボードはオーディオ用にレギュレータで3.3Vを生成しているため、3.5V以上の電圧が必要です。 https://blog.boochow.com/article/rpi-pico-spec-5.html より



出力先をusbに変更
サンプルをそのままビルドしただけだとusb経由でシリアル通信ができない。
hello_worldではusbとserialを別々に作っているので、ここを確認した。
プログラム上では差分はなく、CMakeLists.txtでusbを有効にし、uartを無効にしていた。
https://github.com/raspberrypi/pico-examples/blob/master/hello_world/usb/CMakeLists.txt#L9-L11
hello_worldではusbとserialを別々に作っているので、ここを確認した。
プログラム上では差分はなく、CMakeLists.txtでusbを有効にし、uartを無効にしていた。
https://github.com/raspberrypi/pico-examples/blob/master/hello_world/usb/CMakeLists.txt#L9-L11
pico-examples/i2c/mma8451_i2c/CMakeLists.txt に下記を追加することでusbでシリアル通信できるようになる。# enable usb output, disable uart output
pico_enable_stdio_usb(mma8451_i2c 1)
pico_enable_stdio_uart(mma8451_i2c 0)
動作確認
前の投稿と同じようにビルド結果のuf2ファイルをpicoに書き込み、teratermで出力を確認する。

終わりに
ひとまず動かしてみました。exampleの中身の確認もいずれ記事にしたい。
この辺とかでgpioファンクションを確認してからだとわかりやすそう。
この辺とかでgpioファンクションを確認してからだとわかりやすそう。


